

工場経営Labでは、日本の中小製造業が抱える深刻な労働力不足と技術継承の課題を解決するため、IoTおよびロボット技術を戦略的に現場へ実装するための研究を始めます。研究は、情報の可視化(IoT)と物理的実行(ロボット)の本質的な違いと、それらが融合した際の相乗効果を、先進的な取り組み事例から分析します。はじめに、今回から複数回にかけて、限られたリソースのなかでコストを抑えつつ工場の自動化を段階的に推進するための基礎知識と、今後の具体的な実装ロードマップを体系的に整理します。
研究者紹介

インド出身。高校卒業後、2022年に来日し高専で電子機械工学コースを専攻。現在はものつくり大学情報メカトロニクス学科所属。機械工学と電子工学の基礎を融合させた「メカトロニクス」を中心に、自律走行型クローラロボットやPython・MATLABを用いたデータ解析、自動化技術などを研究。ハードウェアとソフトウェアがクロスオーバーする領域で、言語やテクノロジーを駆使しながら、複雑な物理システムを効率的なソフトウェア自動化で繋ぐアプローチに取り組む。
【研究目的】「人手不足」と「匠の技の承継」に悩む中小工場を最新技術で救うための挑戦
日本の製造業は今、若手人材の不足と職人の高齢化による「技術消滅」の危機に直面しています。本研究の目的は、お金もIT人材も少ない現場が、最新技術を使って明日から作業を楽にする具体的な方法を解き明かすことです。数億円をかけて工場丸ごと新しくするのではなく、今ある古い機械に数千円のセンサーを「後付け」し、スマートフォンの画面と繋ぐような小さな自動化(スモールスタート)こそが 必要不可欠な要素です。
実際の取り組み事例として、自動車の骨組み部品を製造している旭鉄工株式会社のケースが非常に参考になります。この工場では、数十年前から使い続けている骨董品のような油圧プレス機に、市販されている安価な光センサーをテープで直接貼り付けました。機械がガチャンと1回動くたびに、センサーの光が遮られ、その回数や、機械がトラブルで停止した正確な時間を自動的に集計して事務所のパソコンへ送る仕組みを自作したのです。
これにより、それまで作業員が1日の終わりに手を止め、記憶を頼りに1時間かけて手書きしていた紙の伝票(日報)が完全に廃止されました。さらに、工場のどこで無駄な空き時間や待ち時間が発生しているかが1円単位で目に見えるようになり、大掛かりな改造をせずとも生産性を30%以上も向上させることに成功しました。この「今ある設備を活かして、現場の痛みをピンポイントで解決する」という実在の成功パターンをベースに、中小企業が生き残るための実践的な自動化の条件を誰にでもわかる形で明確にします。
研究者の背景
本研究の技術的な信頼性を支えるのは、私がこれまでメカトロニクス(機械・電子・情報の統合)領域において積み重ねてきた、極めて実戦的な開発のバックグラウンドです。私は、頭で考えた理論をただ語るだけでなく、実際に自分の手でハードウェアを設計し、制御ソフトウェアを書き込んで動かすプロセスを一貫して形にしてきました。
研究プロジェクトなどで取り組んできた「自律走行型クローラーロボット」および「アーム付きクローラーロボット」の開発に取り組んできました。クローラーロボットとは、キャタピラのような足回りを持つ移動マシンのことです。一般的なタイヤでは進めない段差やデコボコした床面でも安定して走行できるため、工場の複雑な搬送経路で非常に役立ちます。
また、アーム付きクローラーロボットは、その高い移動力に加えて「物を掴む・移動させる」という器用な手の動きを兼ね備えており、人間が立ち入るのが難しい危険な場所での作業や、自動で荷物を棚から出し入れする作業(ピッキング)の効率化に貢献します。
これらのロボットを形にするため、私はまず制御マイコン基板である「Arduino(アルドゥイーノ)」をベースにシステムを組み立て、周囲の障害物を検知する超音波センサーなどの各種電子部品を最適に配置・配線しました。そして、ロボットの「頭脳」となるプログラムにはC++という言語を使用し、センサーから得られるリアルタイムの情報を基に、障害物を検知して自動でルートを変更・回避する高度な制御ロジックを実装しました。
このように、現場の課題に合わせて必要な「センサー」「マイコン」「ソフトウェア」を選定し、一つの実用的なシステムとしてまとめ上げる統合力こそが、私のIoT・ロボット実装研究における最大の強みです。

(Arduinoマイコンとセンサー類の回路インテグレーション)
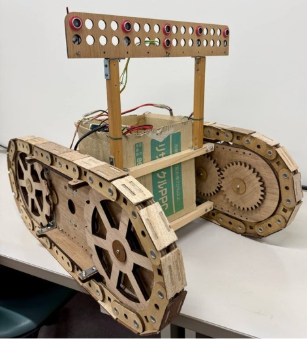
(開発した自律走行型クローラーロボットの全体像)
状況を捉える「神経」としてのIoTと、物理的に作業を動かす「手足」としての ロボット
工場やビジネスの現場をデジタル化する際、多くの人が「IoT」と「ロボット」を同じような最先端テクノロジーとして混同してしまいがちです。の2つの違いを最もわかりやすく、かつ本質的に理解するためには、人間の体に例えて考えと良いでしよう。
状況を捉える「神経」としてのIoT
まず「IoT(モノのインターネット)」とは、一言で言えば工場の状態を目に見えるようにする「神経系(目や耳、皮膚)」の役割を果たす技術です。機械の温度、振動、あるいは「今、稼働しているか、止まっているか」という物理的な状態を、センサーを使って電気信号(データ)に変え、インターネットを通じてパソコンやスマートフォンに送り出す仕組みを指します。 身近な例で言えば、「部屋の温度を測ってスマホに現在の室温を知らせてくれるスマート温度計」がIoTです。これによって、人間はいちいち現地に行かなくても、遠く離れた場所から現場の「今」を正確に把握(情報の可視化)できるようになります。
物理的に作業を動かす「手足」としてのロボット
一方で、「ロボット」とは、受け取った情報に基づいて自分の頭(プログラム)で判断し、物理空間で実際に作業を行う「手足」の役割を果たす技術です。私が開発してきたクローラーロボットやアームロボットのように、モーターを駆動させて移動したり、物を掴んで動かしたりする物理的な実行力を持ちます。
身近な例で言えば、人が物理的に作業を動かす「手足」としてのロボット 近づいたことをセンサーが察知して、自動でモーターを回してドアを開ける「自動ドア」もシンプルなロボットの一種です。これにより、人間が力仕事や危険な作業をしなくても、機械が自律的に目的を達成(物理的な自動化)してくれます。
この2つの決定的な違いは、「情報を集めるだけ(IoT)」か、「物理的なアクションを起こすか(ロボット)」という点にあります。そして、それぞれが最も価値を発揮する活用方法の例を挙げると、その相乗効果がはっきりと見えてきます。
例えば、IoT単体の価値が活きる例としては、工場のベテラン職人の機械操作をデータ化することが挙げられます。レバーを押す強さやタイミングをセンサーで測定すれば、これまで職人の「勘」に頼っていた暗黙知を、誰もが確認できる数値データとして残すことができます。これだけでも技術継承に大きな価値があります。
一方で、ロボット単体の価値が活きる例としては、あらかじめ決められたルートを往復して荷物を運ぶ固定型の自動搬送機が挙げられます。決まった定型作業を疲れずに高い精度で繰り返すことで、現場の単純労働の負担を劇的に減らすことができます。
まとめ
本研究では、読者の皆様が明日からマネできる「自動化の具体的なステップ」を紹介します。今後順次掲載していきますので、順番に読み進めるだけで、スマート工場の基礎から経営への活かし方までが自然と身につく構成にしています。
- 第1章:IoTとロボットの定義と相互補完メカニズム
(情報を集める神経と、実際に動く手足がどのようにお互いを支え合うのか、基本を学びます)
- 第2章:リモコン制御と自律走行の機能的差異と導入判断
(人が操縦するラジコン型と、機械が自分で考えて動く自律型の違い、どちらを選ぶべきかを解説します)
- 第3章:ロボット開発を構成する3大要素(機械・電子・情報工学)の統合
(物理的な体、電気の通り道、考える脳の3つを、一つのシステムとして組み合わせる方法です)
- 第4章:製造現場における自動化のトリガー(課題・環境・安全)の分析
(工場のどんな「困りごと」や「危険」をきっかけにして自動化を進めるべきかを分析します)
- 第5章:物理空間を認識するセンサー技術とデータ処理のメカニズム
(ロボットが壁や障害物との距離を測り、周囲の状況を正しく認識するための目と耳の仕組みです)
- 第6章:環境適応型ロボットの形態選定(移動機構と作業腕)
(工場の床のデコボコに合わせたキャタピラなどの足回りと、物を掴むアームの最適な選び方です)
- 第7章:スマート工場におけるIoTネットワーク基盤の構築
(機械のデータを途切れなく安全にパソコンやクラウドへ届けるための、通信の土台作りです)
- 第8章:オープンソース(ROS/Arduino)を活用した開発コスト抑制策
(世界中で無料で公開されているプログラムや安価な基板を賢く使い、開発費を抑える裏ワザです)
- 第9章:IoT連携による予兆保全(PdM)とダウンタイム削減
(機械が完全に壊れて工場がストップしてしまう前に、異常を察知して修理する仕組みです)
- 第10章:ロボット導入による品質管理のデジタル化と歩留まり向上
(機械が疲れずに同じ作業を繰り返すことで、不良品を減らし、製品の品質を一定に保つ方法です)
- 第11章:人的リソースの再配置:単純作業から創造的業務への転換
(ロボットに重労働を任せることで、人間がより安全で、工夫を凝らす仕事に集中できる環境を作ります)
- 第12章:投資対効果(ROI)の算定と中長期的な経営インパクト
(導入したシステムが「何年で元を取れるか」を、経営層にも納得してもらえる数字で計算します)
- 第13章:次世代製造業(Society 5.0)に向けた実装ロードマップ
(最新技術を味方につけた日本のものづくりが、これから目指すべき未来の工場の姿をまとめます)