

日本の製造現場、とりわけ限られたリソースでやりくりする中小工場において、資材や部品の「搬送・移動工程」の自動化は、最も投資対効果(ROI)が出やすい領域です。しかし、いざ移動型ロボットを導入しようとした際、多くの現場が「人間がコントローラーで動かす リモコン制御」と「ロボットが自分で考えて動く自律走行」のどちらを選ぶべきかで頭を悩ませます。
本稿では、これら2つの移動制御技術の決定的な機能的差異を、センサーデータやアルゴリズムの視点から徹底的に比較します。さらに、高額な投資を無駄にしないための「現場の状況に応じた導入判断基準」を、国内外の先進事例と共に分かりやすく解説します。
リモコン制御(遠隔操作・手動制御)のメカニズム
リモコン制御とは、オペレーター(人間)が無線通信(Wi-Fi、Bluetooth、5Gなど)を介して、ロボットの駆動部(モーターやサーボ)へ直接、移動指令(前進・後退・旋回)を送信する方式です。
◎リモコン制御の特徴
主導権:オペレーター(人間)
判断プロセス: 人間の目(またはカメラ映像)→ 人間の脳 → 指令送信。
通信依存: 指令パルスをリアルタイムで駆動部へ送信。
柔軟性: 非定型な作業や突発的な障害物に即座に対応可能。
リスク: 通信遅延(レイテンシ)や操作ミスが事故に直結。

自律走行(Autonomous Navigation)のメカニズム
自律走行とは、ロボット自身が搭載されたセンサーを用いて「自分の位置(自己位置推定)」と「周囲の状況判断(地図作成)」をリアルタイムに行い、目的地までの最適なルートを計算して走行する方式です。現在、最も注目されているのがAMR(Autonomous Mobile Robot:自律移動ロボット)です。
◎AMR(自律移動ロボット)の特徴
- 自己位置推定: 搭載センサー(LiDAR/3Dカメラ)で現在地を特定。
- 経路計画: 目的地までの最適ルートをオンボードPCで計算。
- 動的回避: 突発的な障害物を検知し、自ら迂回ルートを生成。
- 生産性: 人間を拘束せず、24時間365日の稼働が可能。

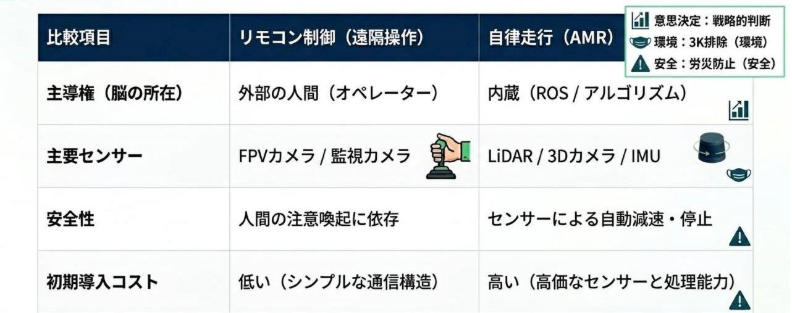
両技術の機能比較マトリクス
現場導入における判断基準(どちらを選ぶべきか)
「自律走行の方が賢くて優れているから、すべて自律走行にすべきだ」と考えるのは、工場経営の観点からは間違いです。コストと工場の環境特性を天秤にかけ、正しい投資判断を下す必要があります。
(1) リモコン制御を選ぶべき現場
- 環境が極めて複雑、または常に変化する場所:
床が常に油や粉塵で汚れておりセンサーのレンズが曇る場所、あるいは、数分おきに荷物の配置がガラリと変わり、ロボットが地図(SLAM)を見失ってしまう現場。
- 非定常な作業(イベント対応):
決まったルートの搬送ではなく、「たまに重い機材を隣の棟へ運びたい」という、人間のその場の判断が必要な単発の作業。
- 危険地帯への立ち入り:
人間が近づけない高温環境、放射線量が強いエリア、ガスが充満する可能性のある暗渠などの点検業務。
(2) 自律走行(AMR)を選ぶべき現場
- 定常的かつ高頻度な搬送作業:
「A棟のプレス工程から、B棟の組立ラインへ、1時間に10回部品箱を運ぶ」といった、パターン化されたルーティンワーク。
- 人手不足が深刻な24時間稼働工場:
夜間シフトの搬送人員をゼロにし、昼間のコア作業に人間を集中させたい工場。
- 安全確保が最優先される現場:
多くの作業員やフォークリフトが行き交う通路。人間の不注意による接触事故を、ロボット側のセンサーによる100%確実な自動停止機能で防ぎたい場合。
グローバル先進企業の実装事例
【リモコン・遠隔制御の事例】
ボーイング(Boeing:アメリカ・世界最大手の航空宇宙機器メーカー)
航空機の組み立てにおいて、主翼の内部(ウイングベイ)は、人間が物理的に進入することが不可能なほど極めて狭小で、かつシーリング剤などの有害な化学物質や揮発ガスが漂う過酷な環境です。従来、この過酷な密閉空間でのボルト締めや製品検査は作業員に極度な負担を強いていました。
これをボーイング社は、5G超低遅延通信、VR(仮想現実)ヘッドセット、および力触覚フィードバック(ハプティクス)を搭載した「遠隔操作コックピット(リモコン制御)」へと完全移行しました。作業員は現場から完全に離れた快適なオフィスで3Dゴーグルを装着し、ロボットアームとリアルタイムに同期するコントローラー(リモコン)を操作。1ミリ単位の精密なボルト締めや製品検査を、人間ならではの高度な判断力を活かして安全に行っています。危険・過酷作業の無人化と品質保証を両立した、次世代のものづくりモデルです。

【自律走行の事例】
BMWグループ(ドイツ・自動車メーカー)
BMWのスマート工場では、部品倉庫から組立ラインへのコンポーネント搬送に、自律走行ロボットである「STR(Smart Transport Robot)」を数百台規模で完全自律走行させています。
工場のレイアウトが変更されても、従来のAGV(無人搬送車)のように床に磁気テープを貼り直す必要がなく、ロボットのソフトウェア上の地図を1回更新するだけで、その日のうちに新しいルートでの自律搬送がスタートします。これにより、搬送効率が大幅に向上し、物流コストの約30%削減を達成しました。

まとめ
本稿のまとめとして、自動化の初期投資において重要なのは、「最先端の技術だから」という理由で高額な自律走行ロボットを闇雲に導入することではありません。「作業の定常性(繰り返し)」と「現場環境の安定度」を厳密に評価し、リモコン制御によるスモールスタートで十分なのか、あるいは完全自律走行による省人化へ踏み切るべきなのかを見極める判断力です。
情報の見える化(IoT)と組み合わせることで、ロボットの稼働データからさらに無駄を削ぎ落とすことが可能になります。
参考文献